2021년 8월 테슬라는 갑자기 휴머노이드 로봇 Optimus를 대중에게 공개한 적 있습니다.
AI학습 알고리즘, 그리고 사람과 같은 형태의 손가락을 활용한 휴머노이드 로봇을 생산 라인에 투입하여, 대량생산하겠다는 테슬라의 당찬 포부!
하지만, 이 당시 테슬라의 로봇은 모두의 비웃음거리였습니다.
깡통같이 생긴 외관에, 제대로 걷지도 못하는 형편없는 수준의 휴머노이드.
심지어 휴머노이드 로봇은 비용적인 측면에서도 적합하다고 생각되지 않는 데다가, 이 당시 발표된 로봇은 아무런 작업도 수행할 수 없을 것 같았기 때문이죠

그러나 2023년 12월, 테슬라는 1분 43초짜리 영상을 통 Optimus Gen2 라는 로봇을 공개하면서, 모두를 놀라게 해버립니다.
불과 2년 사이에 확연히 달라진 기술의 발전 속도를 보여주면서, 이정도 속도라면 정말로 테슬라가 휴머노이드 로봇을 양산할 수도 있겠구나 라는 생각이 들게 된 것이죠.
우선, 깔끔해진 외관, 그리고 사람과 어느정도 유사하게 걸을 수 있는 보행 능력, 무엇보다 손가락을 자유자재로 움직이며 계란을 깨뜨리지 않고 잡을 수 있는 기능을 보여줍니다.
손가락에는 촉감 센서가 포함되어 있으며, 이 센서에 AI 기술까지 포함시켜 얼만큼의 힘을 주어야 계란이 깨지지 않을지 스스로 학습할 수 있다는 것이 가장 놀라운 점입니다.
비전 기술과 보행 능력, 그리고 촉각에 대한 인공지능 학습능력, 거기다 로봇 1대 생산가를 약 2천만원대로 맞추겠다는 가격경쟁력까지 갖춰지게 된다면, 휴머노이드 시장에 큰 바람이 불어올 것이 분명하기 때문에, 이제는 테슬라의 휴머노이드 로봇에 대해서 아무도 무시할 수 없는 상황이 되어버린 것입니다.
그렇다면, 어떤 방법으로 로봇의 제작 비용을 절감하는 것일까요?
가장 중요한 것은, 로봇 구동에 핵심이 되는 액츄에이터의 기술 내재화 입니다.
모터와 감속기 등의 액츄에이터는 기본적으로 구매를 해서 사용하는데 (특히 국내에서는 직접 개발하는 곳이 많지 않거나, 성능이 좋지 않기 때문에 해외에서 수입하는 경우가 대부분입니다.) 액츄에이터 기술의 내재화가 어렵기 때문에 그만큼 제작 비용과 원하는 성능을 맞추기가 어렵고, 무엇보다 생산 일정에도 차질이 생기는 가장 중요한 요인 중 하나가 바로 '액츄에이터' 입니다.
따라서 테슬라는 로봇을 경량화 하고, 효율성을 높일 수 있는 모터와 감속기 등의 액츄에이터를 직접 제작하고자 하는 연구를 지속적으로 수행해 왔습니다.
저는 이제부터 테슬라가 과연 어떤 액츄에이터 기술을 가지고 있는 것인지, 조금씩 연구를 해보려고 합니다.
Optimus Gen-2의 주요 특징
- 테슬라가 직접 설계한 액츄에이터와 센서
- 2-DoF를 갖는 목
- 전장과 하네스가 통합된 액츄에이터
- 30% 향상된 보행속도
- 발의 힘과 토크를 센싱
- 관절을 갖는 발가락 부
- 인간의 발 형상을 모방
- 전체적인 중량 10% 감소
- 균형과 전체 바디의 제어능력 개선
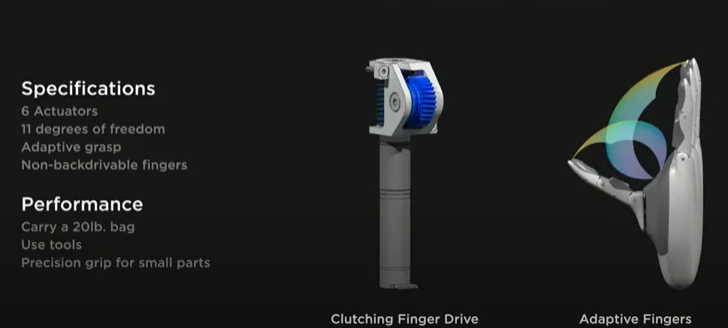
- 11개 자유도를 갖는 손
- 모든 손가락에 촉각 감지 기능 포함
- 섬세한 조작 (계란을 잡을 수 있는 촉각 제어 등)
Optimus의 액츄에이터
테슬라의 Optimus는 세가지 종류의 회전 액츄에이터와 세 가지 종류의 선형 액츄에이터를 개발하여 사용하고 있습니다.

Linear Actuator
테슬라의 리니어 액츄에이터는 planetary roller system을 사용하며, 기본적으로 볼스클 리드스크류 디자인을 따르지만,
기존의 magnetic armature coil이 아닌 브러쉬리스 코어 모터를 사용합니다.
(구체적인 내용에 대해서는 추가적인 공부가 필요하겠습니다..)
기존의 볼스크류 디자인은 효율적이고 사용하는 전력도 적지만, 가격적인 측면에서 비싸기 때문에 새로운 형태를 고안한 것이며, 브러쉬리스 전원 시스템을 통해 수명을 늘리고, 소프트웨어로 제어되는 특정한 구동 모드를 가능하게 합니다.

2인치 (약 5.1 cm)를 왔다갔다 하는 수준의 리니어 액츄에이터가 500kg의 피아노를 들어올릴 정도의 힘을 낼 수 있습니다.
테슬라가 공개한 Optimus Gen2 영상에서 이 작은 액츄에이터 하나가 피아노를 들어올리는 모습을 보여주면서 관심도를 제대로 끌어올리기도 했습니다.
그런데 휴머노이드에 사용되는 모터 하나가 굳이 500kg나 들어올려야 하는 이유가 있을까요??
이 질문에 대한 테슬라의 대답은, 로봇이 보행을 할 때 다리가 움직이고, 회전함에 따라 액츄에이터의 힘이 감소하게 되지만, 스피드가 증가하기 때문에 좋은 trade-off가 일어난다는 것입니다.
내용이 어려운데, 이 부분은 추후 심화 기술분석에서 다시한번 다루기로 하고 우선 넘어가겠습니다!

Optimus의 계속되는 발전
Youtube, Twitter, Linkdin 등을 통해 테슬라는 계속해서 휴머노이드 로봇 Optimus의 새로운 소식을 전하고 있습니다.
며칠 전에는 Optimus의 보행 속도가 2달 전에 비해 30%가 빨라졌다고 발표하기도 하고, Gen3 모델의 출시가 임박했다는 소식도 들리고 있으며, 이미 빨래를 개는 영상이라거나 박스를 잡고 나르는 영상들이 공개되고 있습니다.
향후 모델과 앞으로 어떤 작업을 수행할지에 대해서 개인적인 추측에 대한 영상도 쏟아져 나오는 중일 정도로, 테슬라의 행보에 많은 관심이 보이는 것에는 그만큼의 이유가 있을 것입니다.
심지어 테슬라봇을 쫓아 중국에서는 짝퉁 테슬라봇이 공개되었고, Figure AI 에서도 휴머노이드 로봇 영상이 공개되었으며, 구글에서는 mobile Aloha가, 그리고 구글의 mobile Aloha를 빠르게 쫓아가는 다양한 서비스 로봇까지..
그야말로 로봇 전쟁입니다.
테슬라의 휴머노이드 로봇인 Optimus의 액츄에이터 기술에 대해 작성을 해보았습니다.
사실 아직 훨씬 더 많은 기술적 분석이 필요합니다.
액츄에이터가 정확히 어떻게 동작하는지,
그리고 손 부분의 Finger는 또 어떤 메커니즘으로 구동되는지는 아직 다루지 못했구요..
기능적인 내용에 대해서도 더욱 분석할만한 내용들이 남아 있습니다.
처음부터 완벽하게 분석할 수 없으니.. 차차 더 깊게 들어가 보자구요!